智慧矿山 智能化采煤技术现状与巡检机器人发展中的计算机软硬件技术开发
随着全球新一轮科技革命和产业变革的深入,智慧矿山已成为矿业高质量发展的核心引擎。作为煤炭生产大国,我国正加速推进矿山智能化建设,其中智能化采煤技术与智能巡检机器人的发展尤为关键,而这背后离不开计算机软硬件技术的持续创新与深度融合。
一、我国智能化采煤技术的现状与计算机技术支撑
当前,我国智能化采煤技术已从单点自动化向系统智能化、协同化方向迈进,主要呈现以下特点:
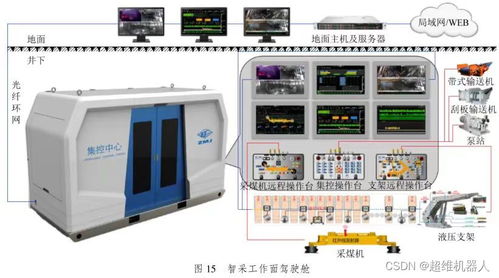
- 综采工作面智能化:通过高精度传感器、液压支架电液控制系统、智能采煤机及刮板输送机协同控制,实现“无人跟机作业,有人安全巡视”。计算机硬件如工业控制计算机、可编程逻辑控制器(PLC)及边缘计算设备构成了系统的“神经中枢”,而软件层面则依赖先进的综采自动化控制平台、三维地质建模与孪生系统,实现远程监控、自适应割煤与故障诊断。
- 智能决策与管控平台:基于大数据、云计算和人工智能算法,构建矿山“智慧大脑”。硬件上依托高性能服务器集群与数据中心;软件层面则开发了集生产、安全、设备、人员管理于一体的智能管控平台,利用数据挖掘和机器学习优化开采工艺、预测设备寿命,提升整体运营效率与安全水平。
- 5G与工业互联网融合:高速、低延迟的5G网络为海量数据实时传输提供了“信息高速公路”,结合工业互联网平台,实现了采煤设备、环境监测系统与云端平台的全面互联。相关硬件(5G基站、矿用防爆通信模组)与软件(网络切片管理、协议转换)的开发是保障通信可靠性的基础。
二、智能巡检机器人的发展及其技术内核
智能巡检机器人是智慧矿山中替代人工进行高危、重复巡检任务的重要载体,其发展高度依赖计算机软硬件技术的突破:
- 本体与感知硬件开发:机器人本体需适应井下复杂地形(如防爆设计、四足或履带式移动机构)。感知层依赖于多种传感器的集成,包括激光雷达、视觉摄像头(含红外)、气体传感器、拾音器等。专用芯片(如AI视觉处理芯片)和嵌入式系统的开发,实现了传感器数据的实时采集与初步处理。
- 自主导航与定位技术:在卫星信号缺失的井下环境,融合SLAM(同步定位与建图)、惯导、UWB(超宽带)等技术实现精准定位与自主路径规划。这需要强大的计算硬件(如移动GPU或专用计算单元)和复杂的算法软件支持。
- 智能识别与诊断软件:基于计算机视觉和深度学习算法,机器人能够自动识别设备状态(如仪表读数、跑冒滴漏)、环境异常(如裂缝、瓦斯浓度)及人员违章。软件层面涉及图像识别模型训练、故障知识库构建及边缘-云协同分析框架的开发。
- 协同通信与能源管理:机器人需与中央控制系统保持稳定通信,并具备高效的自主充电管理能力。相关软硬件开发包括低功耗通信模块、无线充电技术及智能调度算法。
三、挑战与未来展望
尽管已取得显著进展,我国智慧矿山建设仍面临挑战:井下设备接口标准不一导致数据互通困难;复杂地质环境下感知与决策算法的鲁棒性有待提升;高端传感器、专用芯片等核心硬件仍部分依赖进口。
计算机软硬件技术开发将聚焦于:
- 硬件层面:研发更高性能、更耐恶劣环境的矿用专用芯片、传感器与执行机构;推进设备轻量化与能源高效化。
- 软件与算法层面:深化AI与工业知识的融合,发展更具解释性和自适应性的算法;构建统一、开放的矿山操作系统与数据标准体系。
- 系统集成层面:强化“云-边-端”协同计算架构,实现更广泛的设备互联与智能协同。
###
智能化采煤技术与智能巡检机器人的蓬勃发展,是计算机软硬件技术与矿业深度融合的生动体现。持续加强自主核心技术攻关,推动软硬件协同创新与系统集成,将是驱动我国智慧矿山从“点的突破”迈向“系统智能”的关键,最终实现安全、高效、绿色的矿产资源开发新模式。
如若转载,请注明出处:http://www.iceftech.com/product/78.html
更新时间:2026-06-19 15:58:43









